Manipulative KI
Manipulative KI bezeichnet die Fähigkeit einer Maschine, sich zu bewegen und damit ihre unmittelbare Umgebung zu verändern. Allerdings bezeichnen viele Wissenschaftler ein System nur dann als "intelligent", wenn es ein gewisses Maß an Selbstständigkeit besitzt.
Meist werden solche Systeme als Roboter bezeichnet.
Ein gutes Beispiel wäre eine Maschine mit einem Greifarm, welcher nicht immer nur stur einen Bewegungsablauf wiederholt, sondern zum Beispiel mittels Kraftsensoren bestimmen kann, wie stark er den Gegenstand vor sich festhalten muss, damit er weder herunter fällt, noch zerstört wird. So könnte diese Maschine ein rohes Ei anheben, aber auch einen Ziegelstein.
Oft findet manipulative KI dann Verwendung, wenn die Aufgabe für einen Menschen zu gefährlich oder zu aufwändig wäre, also zum Beispiel bei langen Weltraumreisen, unter Wasser (Wartung von Ölplattformen), in der Nähe von Radioaktivem Material, bei Bränden, oder auf Minenfeldern.

 (Jefferis, David; Künstliche Intelligenz: Vom Taschenrechner bis zum Androiden; S.14/S.18)
(Jefferis, David; Künstliche Intelligenz: Vom Taschenrechner bis zum Androiden; S.14/S.18)
Am Beispiel der Marsroboter Opportunity und Spirit wird auch klar, wieso es günstig ist, wenn ein Roboter autonome Entscheidungen treffen kann. Schließlich kann man bei der Programmierung nicht alle Einzelheiten und unvorhersehbaren Störungen beachten. Also muss das Gerät mit allgemeinen Regeln und Informationen über seine Umgebung auskommen, denn schließlich ist die Befehlsübermittlung zum Mars zu langwierig um sie bei jedem zu umfahrenden Felsen zu nutzen.
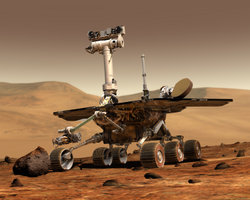
Mars Rover Spirit
(de.wikipedia.org/wiki/Spirit)
Der Einsatz von Robotern, hat bei vielen Aufgaben noch einen weiteren Vorteil. Ein Roboter ist auf seine Aufgabe spezialisiert, er muss kein Allround-Talent sein, wie der Mensch. Er kann also seine "Augen" durchaus auch an den Füßen (falls vorhanden) haben. Dadurch kann er genauer arbeiten und unter Umständen auch Aufgaben erfüllen zu welchen ein Mensch nicht in der Lage wäre.
 (Jefferis, David; Künstliche Intelligenz: Vom Taschenrechner bis zum Androiden;S.26)
(Jefferis, David; Künstliche Intelligenz: Vom Taschenrechner bis zum Androiden;S.26)
Um selbstständig arbeiten zu können, haben die meisten Robotter in etwa den folgenden Aufbau. Sie besitzen Sensoren (Kameras, Photozellen, Temperaturfühler, …) um Informationen über ihre Umwelt zu erlangen, Prozessoren, bzw. Steuereinheiten, um diese zu verarbeiten und Effektoren (bewegliche Greifarme, Fahrgestell, …), die, von den Prozessoren gesteuert, dann die notwendigen Tätigkeiten ausüben.
Zum Abschluss sei noch gesagt, dass die Fähigkeiten von Robotern bis heute stark eingeschränkt sind, es jedoch bereits in einigen Bereichen spezialisierte Systeme gibt.
Zurück
(vgl.de.wikipedia.org/wiki/K%C3%BCnstliche_Intelligenz; Bergmann, Martin (Red.); Schülerduden Informatik; S.267; Cawsey, Alison; Künstliche Intelligenz im Klartext; S.209 ff.)